Intelligent computing is gradually replacing logical computing and becoming the core of in vehicle computing.
On May 9-10, 2023, at the 2023 Jietu Automotive Electronic Architecture and Intelligent Driving Forum hosted by Jietu Motors and hosted by Gaishi Motors, Zhang Xiaochen, Marketing Director of Horizon Intelligent Driving Products, stated that intelligent computing is gradually replacing logical computing and becoming the core of in vehicle computing. Currently, with the continuous evolution of DCU, computing power has been enhanced, and regulation has moved towards the collaboration of logical computing and deep learning computing; Intelligent HMI makes driving behavior safer and the experience smoother; Evolving towards domain controller architecture.
Based on powerful algorithms, Horizon Journey 5 efficiently supports the deployment of leading autonomous driving algorithms such as BEV and Transformer, effectively planning for dynamic and static BEV perception, road element association relationships, and target trajectory prediction. It also responds to complex topologies of unprotected left turns, congestion game ramp exits, unprotected right turn paths and timing choices, as well as parking and unloading planning avoidance scenarios, to bring the ultimate user driving experience.

Zhang Xiaochen | Marketing Director of Horizon Intelligent Driving Products
The following is a summary of the speech content:
Changes in the traditional architecture of autonomous driving
Autonomous vehicle is the most challenging system engineering in the history of human industry. It needs to solve complex and changeable dynamic natural scenes, as well as a large number of uncertainties and various dynamic games brought by the system. The horizon starts with the end, and the concept of combining soft and hard continuously drives the evolution of autonomous driving. In this context, how autonomous driving responds to the challenges of system engineering has become a focus. From its initial development to deep learning, the level of autonomous driving is gradually improving, and the level of intelligent safety is also constantly improving. It can be seen that as the level increases, the demand for computing power will inevitably increase. Therefore, the implementation of advanced intelligent driving will make large-scale parallel computing a trend.
For software, it is also gradually moving from 1.0 rule-based to 2.0 data-driven, and the closer it is to the perceptual part, the higher the degree of data-based development. In the evolution of the 1.0 to 2.0 data-driven paradigm, intelligent computing has gradually replaced logical computing as the core of in vehicle computing. In traditional architecture, intelligent driving and cockpit are a separate relationship, and regulation is mainly completed by logical calculations. In intelligent driving, regulation and control are moving towards the collaboration of logical computing and deep learning computing, with the characteristics of low cost and energy consumption.
For Horizon, currently Journey 2 and Journey 3 can support traditional architectures, including intelligent driving and cockpit functions, and have begun to be widely implemented and applied. Most automotive electronic and electrical architectures evolve in the form of central computing platforms and intelligent platforms, which will enable better integration of intelligent driving and intelligent cockpit, and enable data access for people, vehicles, and roads, achieving integrated perception. In this form of intelligent vehicle platform, greater computational power is required to achieve intelligent functions, and the cockpit function can also achieve human-machine interaction to increase trust between humans and machines.
The Architecture and Algorithm of Journey 5
Horizon's Journey 5 and future next-generation chips will better support the electronic and electrical architecture, which is the central computing platform. Horizon released an end-to-end system architecture earlier this year, based on sensor information, which can learn human driving behavior and output intelligent driving functions for all scenarios.
The biggest feature of this architecture is that its ability is more like human driving, and it has been achieved in Journey 5 of Horizon. One of the key steps is dynamic and static BEV perception, such as complex lane lines at intersections and road edges, which can achieve better perception; The second is the association relationship between road elements, which can break away from the dependence on high-precision maps through a purely visual approach; The third is target trajectory prediction. The most powerful point for human driving is to predict its next trajectory through very small movements of the vehicle, so end-to-end models can be used to achieve target trajectory prediction.
Based on this algorithm, challenging scenarios in urban intelligent driving can be well addressed, such as complex unprotected left turns, which means a large number of dynamic vehicle games, as well as static elements of complex intersections, especially intersections such as viaducts, which can be well adapted to this scenario. Furthermore, in complex congested scenarios, it is possible to achieve better ramp entry and exit.
Powerful algorithms require parameters of billions, and in the face of complex intelligent driving scenarios and higher requirements for experience, the scale of required parameters will continue to increase. The surge in parameter scale is a demand for large computing power and high bandwidth, and the architecture of Horizon computing will always follow this demand. At the current stage, Journey 5 is a 128TOPS chip with a computing power of 1718FPS. At the same time, in order to meet the continuously growing demand for models and parameters in the future, the computing power will continue to be improved.
The "strongest brain" of intelligent driving
The Horizon architecture is called BPU, also known as the "strongest brain" of intelligent driving. For each generation of BPU architecture, algorithm requirements need to be addressed. The first generation architecture is more focused on solving the function of assisted driving, optimized based on a combination of software and hardware. The second generation architecture will gradually evolve towards L2 and L2+with autonomous driving, and there will be more demand for sensor access, as well as the integration of time and space. At this point, it is necessary to support trajectory prediction and other functions as well as BEV architecture.
This architecture is designed to provide stronger computing power and diversity for heterogeneous models. This embodies the most advanced core technologies of Horizon, such as floating-point vector acceleration units, which enable developers to develop and apply in a more fine-grained environment. Virtualization can make development and application more transparent and improve the ability of multi Task parallelism processing.
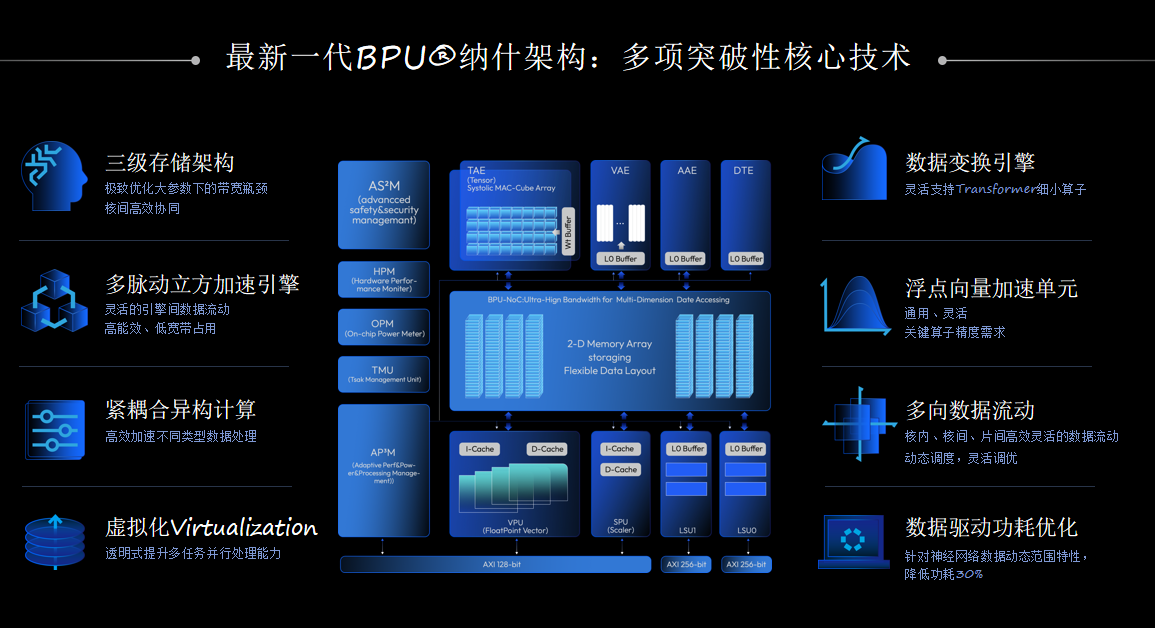
Image source: Speaker materials
For developers, the ease of use of BPU has become one of the key advantages. Based on the foundation and architecture of the previous two generations of BPUs, this generation has developed a new programming paradigm. On the one hand, it can improve computing power and speed, and on the other hand, it can reduce the loss during the process of moving from CPU to BPU, thereby improving computational efficiency. Therefore, for developers, it is more convenient and efficient to use.
Powerful infrastructure has also been built in the cloud to support massive amounts of data and models. Currently, Horizon can support nearly 2.1 billion calculations per second in terms of computing power, and automated annotation has reached a 90% automation rate. It can achieve over 50000 automatic annotations per week, and the scale of subsequent simulation testing will continue to increase by tens of thousands of times. Building such a large-scale cloud computing infrastructure is to improve development efficiency and progress, and promote the development of the entire industry.
The Future Development Trends of Autonomous Driving
Based on current advanced algorithms and cloud infrastructure capabilities, autonomous driving algorithms will gradually move from the current phased paradigm to the unification of the physical world. The concept mentioned in "Fast and Slow Thinking" is that the human brain has two systems, one of which is cognitive chronic. In this system, a world model is constructed, and under this model, the efficiency of the entire system can be analyzed. Another system is the instinctive system of the human brain, such as how to react quickly when encountering risks. I believe that the future architecture will be more about the integration of dual systems, ultimately achieving a unified expression of the physical world.
The autonomous driving industry has experienced rapid development in the past, from all-in-one machines to cost-effective pre control, achieving integrated parking and transportation, and then to L2 and L2+achieving high-speed NOA. Currently, it has achieved full scene autonomous driving, and the ODD scene is continuously expanding and increasing. At present, the industry has developed into an MPI iteration cycle, in which the support of software and hardware capabilities can continuously improve MPI capabilities and better respond to the scenarios and experiences of autonomous driving.
Horizon has always been committed to iterative development, continuously optimizing algorithms and development platforms, and promoting the average level of the key indicator MPI in the autonomous driving industry, reaching 1000 times its current level in 5 years. As a provider of intelligent driving computing solutions, we always adhere to the brand concept of putting people first and putting experience first. In the future, we will continue to implement a win-win cooperation concept. I believe that the value of technology is not to make machines powerful, but to make people greater.
(The above content is from the keynote speech "Evolution of Automotive Electronic and Electrical Architecture Driven by User Value" delivered by Zhang Xiaochen, Marketing Director of Horizon Intelligent Driving Products, at the 2023 Jietu Automotive Electronic Architecture and Intelligent Driving Forum hosted by Geshi Automotive on May 9-10, 2023.)
AMS2024 Exhibition Guide | Comprehensive Exhibition Guide, Don't Miss the Exciting Events Online and Offline
Notice on Holding the Rui'an Promotion Conference for the 2025 China (Rui'an) International Automobile and Motorcycle Parts Exhibition
On September 5th, we invite you to join us at the Wenzhou Auto Parts Exhibition on a journey to trace the origin of the Auto Parts City, as per the invitation from the purchaser!
Hot Booking | AAPEX 2024- Professional Exhibition Channel for Entering the North American Auto Parts Market
The wind is just right, Qianchuan Hui! Looking forward to working with you at the 2024 Wenzhou Auto Parts Exhibition and composing a new chapter!
Live up to Shaohua | Wenzhou Auto Parts Exhibition, these wonderful moments are worth remembering!
Free support line!
Email Support!
Working Days/Hours!


Copyright © 2018, PKT Auto Parts All Rights Reserved
浙ICP备18033565号-1
 浙公网安备33038102332475号
浙公网安备33038102332475号
 English
English Chinese
Chinese




